,现已大范围的应用于布达佩斯 Kolosy广场、ZalaZone测验场等实在路途复原项目。整一个流程包含:

选用搭载激光雷达(LiDAR)、高精度GNSS/INS体系的测绘车(如康谋DATALynx ATX4)履行移动激光扫描(MLS),经过aiData Recorder进行录制,首要路途至少制作两次,保证厘米级空间精度。

运用aiData Annotator将多帧点云拼接为一致的大局坐标系,结合反射率、时刻戳等多通道信息构成高密度、低差错的空间点集。
Tips:具体数据收集精度和点云数据格局可联络康谋技能团队获取,可接受第三方数据,但主张在收集前与咱们技能团队交流优化战略。
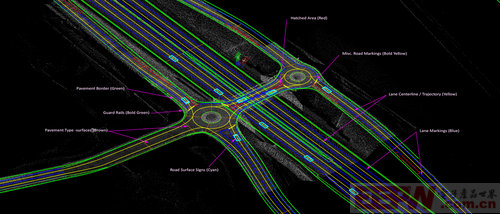
根据聚合点云手艺标示路途元素:车道线、交通标志、人行道、护栏、红绿灯等。输出为GeoPackage格局的HD Map,用于无人驾驶体系参阅。

接收Atlas程序化建模引擎,生成路途、地势等根底结构,再经过aiSim Unreal插件手艺啃咬修建、植被、街景设备,最大极限复现实际细节。为了获取最大精度,康谋将会选用DCC东西,例如Maya、Blender、Substance等东西运用可用数据构建新模型;

传统方法当然精准,但高本钱、高周期、强人工依靠,难以支撑大规模、快速迭代的测验需求。
本文共享的神经网络重建计划,则以NeRF+ 3DGS为核心技能,完结了从实在环境到仿线、仅需数日,完结街景重建
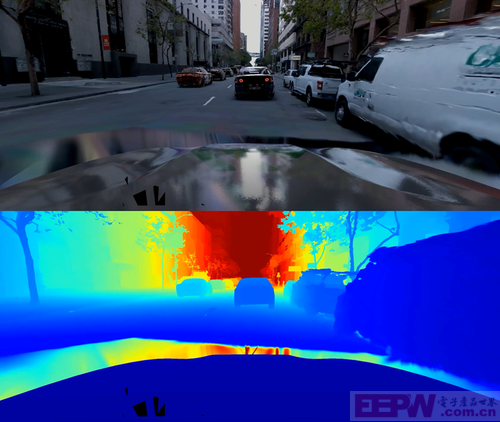
验证3D方针检测精度、Mask2Former丈量像素一致性等方法,验证了神经重建场景在多摄像头视角下的
运用DATALynx ATX4记载图画、LiDAR点云和自车位姿;引荐装备包含Hesai Pandar64、环视非鱼眼摄像头和NovAtel高精度组合导航体系。
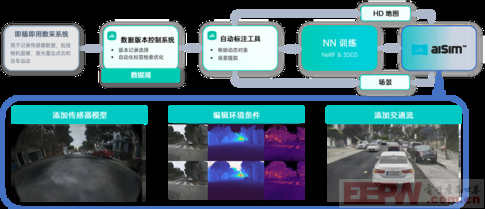
(2)数据转化:将原始数据转化为康谋格局,一致处理点云、图画和标定信息。
(3)主动标示:运用aiData东西链去除动态方针、生成GT数据,完结非因果式追寻。

(5)仿真布置与增强:在aiSim仿真渠道中集成重建场景,装备不同环境(暴雨、夜晚、雪天)、多模态传感器(摄像头、LiDAR、毫米波雷达等)与虚拟交通流。

。咱们和很多同行们正在见证一场仿线)经过激光雷达的精准测绘保证厘米级精度(2)接收3DGS/NeRF完结场景的智能重建
*博客内容为网友个人发布,仅代表博主个人自己的观念,如有侵权请联络工作人员删去。
Copyright © 2012-2022 竞彩体育比赛现场_竞彩体育彩票直播 版权所有 网站地图
